

carte Arduino Mega 2560 (alimentation séparée pour l'arduino/écran et les 16 servomoteurs).
montage MinaBay classique pour la détection du DCC
4 x 74HC595 pour alimenter les 32 leds bicolores sur le TCO
Bibliothèques :
Publié le : Samedi 4 juillet 2026 à 17:57
Avant dans l'arrière cuisine

Déménagement à la place de l'ancien réseau


Publié le : Lundi 1 juin 2026 à 05:48
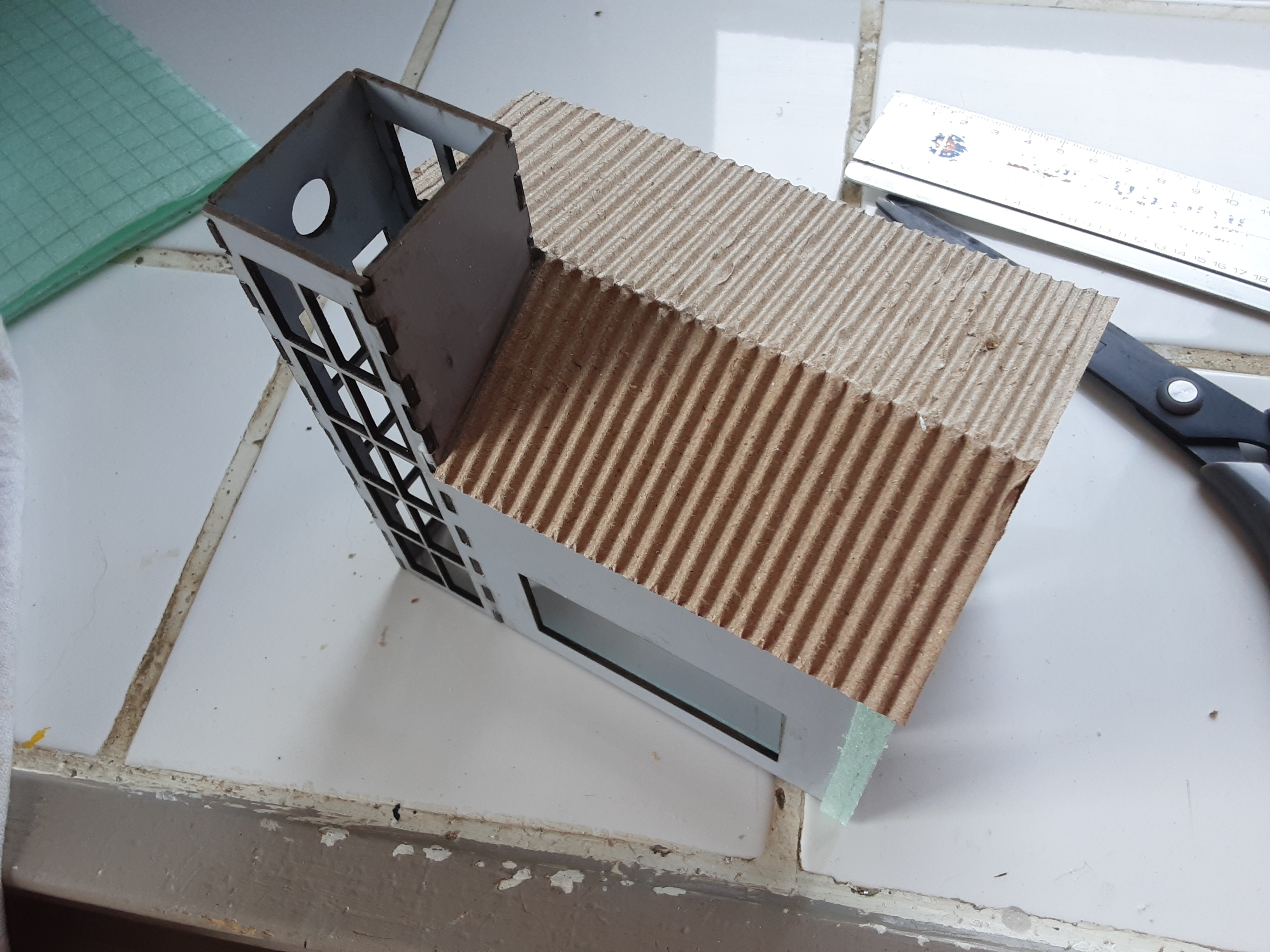
Nouveau bâtiment pour cacher la carte arduino gérant les panneaux d'affichage de la gare et recevoir l'horloge de syncronisation.
Dessin du fichier svg sous Tinkercad et découpe laser par Ludo sur carton calendrier. Toiture boite carton
Publié le : Lundi 1 juin 2026 à 05:12
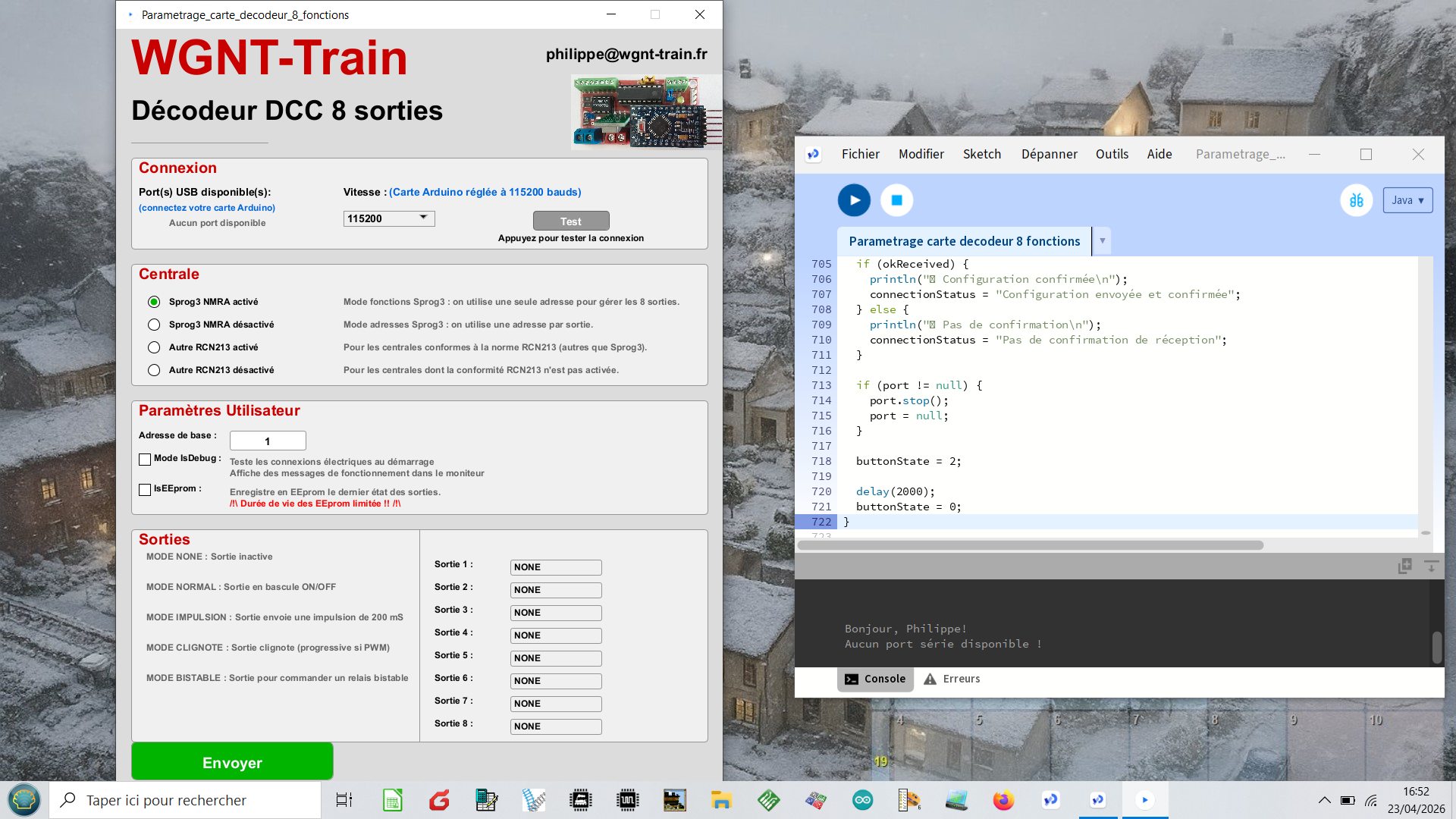
Interface graphique pour paramétrer mes cartes décodeurs d'accessoires DCC à base d'arduino.
Principe :
le programme sous Processing envoie par un port USB à l'arduino les éléments de configuration qui seront enregistrés dans son EEprom.
Ensuite, l'arduino continue ce dont pour quoi il est codé.
Si l'arduino ne reçoit rien du serial, il passe en lecture de l'EEprom, met à jour ses paramètres et continue le code.
Evite d'avoir à toucher aux codes et donc aux débutants de modifier involontairement un code opérationnel.
Publié le : Samedi 25 avril 2026 à 18:16
voici un petit boitier (origine récupération de boite à bonbons) avec un petit arduino mini-pro à l'intérieur, un écran OLED 0"96, un bouton poussoir momentané, un potentiomètre, une led 5mm.
Ce montage sert simplement à relever les angles directs et déviés d'un aiguillage géré par servomoteur. Les valeurs pourront ensuite être reportées dans le décodeur. Mon propre décodeur permet déjà ca, mais comme il se trouve monté sur le TCO, je n'ai pas toujours un accès visuel sur l'aiguillage à régler pour voir ce que je fais.
Comme vous le voyez, je travaille avec "writeMicroseconds" mais il est facile de modifier le code pour travailler avec des angles en degrés.
Au lancement, le montage s'initialise en mettant le servomoteur à son point milieu (led clignotante) afin de permettre un callage mécanique le plus précis possible. On passe en mode réglage avec un appui sur le bouton poussoir (led éteinte) et on ajuste les angles avec le potentiomètre.
On peut imaginer un montage autonome, alimenté par une pile 9V puisqu'il n'a pas vocation à travailler longtemps. A vérifier la consommation.
PS- Amélioration prévue : ajout d'un switch pour gérer les angles soit en mS comme actuellemnt soit en degrés.
Publié le : Jeudi 5 mars 2026 à 16:19
Si vous êtes enregistrés et connectés vous avez la possibilité de choisir d'être avertis quand un nouvel article est ajouté au site
Cliquez ICI
Puis cochez en bas de page les sujets pour lesquels vous souhaitez être avertis si un nouvel article est posté.
Pages vues depuis 16/06/2025 : 427 578